多脚戦闘車両とは
機甲科科生諸君、おはよう。私は、三年次の月山香耶だ。
本日は諸君に、多脚戦闘車両の講義を行うこととなった。
予科練科生である私がこのような講義を行うのは異例のことではあるが、
多脚戦闘車両は制式化されてから間が経っておらず、本科でも教導体制が整っていない。
そのため予科練で搭乗経験を持つ私が、その役目を受けることになったわけだ。よろしく。
多脚戦闘車両は現在世界でも我が国防陸軍のみが所有する対戦車兵器である。
戦車保有数の条約の関係上、装甲車という扱いだ。
合衆国でもHigh Mobility Armoured Car(高機動装甲車)などいくつかの呼称があるようだ。
多脚戦闘車両はまだ実戦経験が無いが、制式化以降演習で最新の主力戦車にも一度も敗北していない。
その圧倒的な対戦車能力は各国の関係者を驚愕に陥れ、
すでに合衆国をはじめとする幾つかの国が研究・開発に着手したことは想像に難くない。
よってこれからの話は多脚戦闘車両搭乗を志す科生はもちろんのこと、
将来類似兵器に遭遇する可能性のある戦車搭乗科生も頭に入れておくべき事項のはずだ。
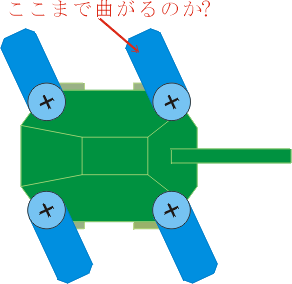
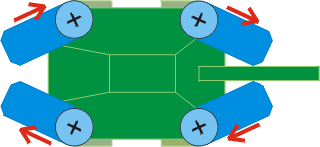
これが多脚戦闘車両の概略図だ。
急だったため、あまり良い資料が手に入らなかった。我慢して欲しい。
当鎚浦予科練生ならば、ハンガーに来てもらえれば見学は可能だ。気軽に声をかけてくれ。
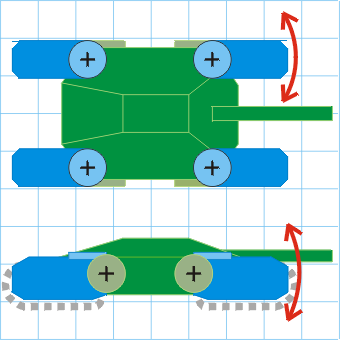
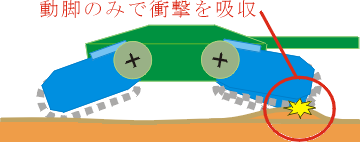
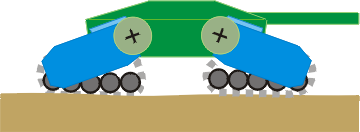
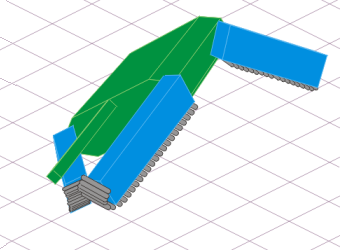
青い部分が動脚で、本車両を最も特徴付けるものである。
それぞれに装軌輪(*)が装備されており、独立に制御可能だ。
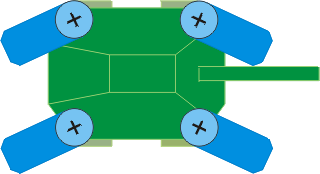
また各動脚は赤い矢印のように上下と左右に独立に向きを変えることが可能だ。
(*) キャタピラのこと
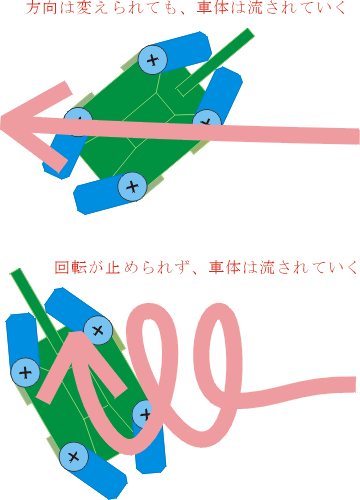
緑の部分が車両本体。戦車と最も大きく異なるのが、主砲が本体に固定され回転しないということだ。
そのため砲撃のためには常に敵と正対する必要がある。
現代の戦車は強力な装甲を前面に集中配備し敵を正面に捕らえることが防御上きわめて重要だということは、
諸君ら機甲科生ならば理解していると思う。
多脚戦闘車両はその考えを徹底化し動脚による高い機動性を与える反面、
相対的に価値の下がる回転砲台を撤廃し軽量化を図ったものである。
国防陸軍の一〇式多脚戦闘車両の基本性能はこのようになる。
- 重量29.4t。
- 出力1000ps。ガスタービンエンジン。
- 主砲は80口径88mm滑腔砲。
- 最高速度132km/h、不整地でも100km/h以上の高速走行。加速も戦車を凌駕する。
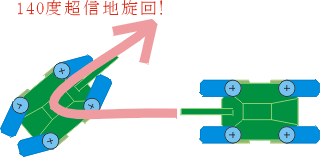
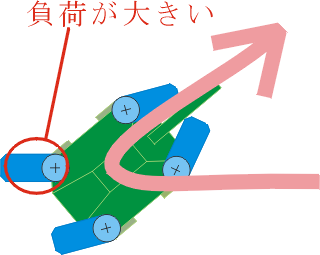
- 旋回中に移動や走行中に向きを変えずに進路変更など、高度な機動が可能。
- 操縦者は小柄なことが求められる。おそらく一人乗り。
- 対戦車兵器として、圧倒的な能力を誇る。